
Research
Vine Robots
Vine Robots are are unique type of soft continuum robot. Unlike traditional robots, which move due to surface contact, the vine robot relies on growth for movement, similar to plant vines and roots. This growth happens by eversion, which adds material at its tip from the inside.

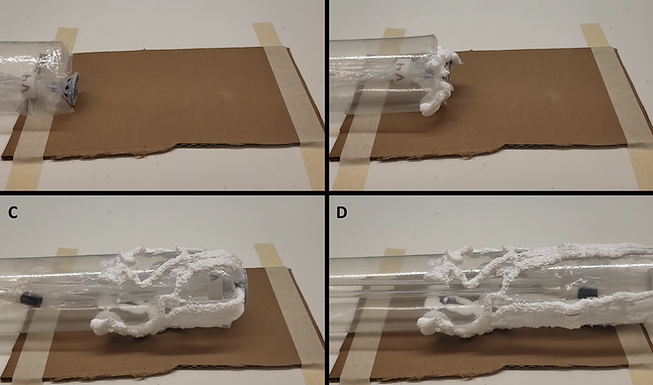
Activated Permanent Rigidity in Soft Robots
There are some situations where a soft robot's notorious compliance is only necessary in the short-term before high stiffness or higher force application is needed. Using foam, one can grow in a soft, compliant manner, and then activate the chemical properties to stiffen the foam and create a more rigid robot. This can then be used as a structural frame or pathway for other robots to use for travel or maneuvering.
Fabric Pneumatic Actuators
In this project we develop an easy-to-manufacture pneumatic actuator muscle with tunable force-to-strain relation. By adjusting the geometry of the actuator, the contraction and force produced by the actuator is physically programmed, which enables sophisticated patterns of motion with simplified control. The device can be used to actuate a wide range of devices, from haptic devices to continuum robots.


Soft Haptics
During kinesthetic teaching, robots gain information through physical interaction when humans kinesthetically guide it throughout the task. While prior works focus on how the robot learns, we are developing haptic systems that provide feedback to the human teacher. Our soft haptic displays wrap around and conform to the surface of a robot arm, adding haptic feedback at existing points of contact without significantly affecting the interaction.
In collaboration with Virginia Tech.
3D PRINTED SOFT ACTUATORS
We are designing and developing a pneumatic soft actuator using 3D printed components. The primary application of this robot would be in haptic devices. Innovations in this project are focused around, but not limited to, optimum soft actuator design for material usage and force application, system identification based on design parameters and eventually, designing a controller to achieve desired functionality while maintaining 4-6 degrees of freedom.
